Bitácora#2
Descripción de la actividad: En esta segundo clase, debido a mis ausencia por temas deportivos, aun así preguntara acerca de las actividades que hicieron, solo me dijeron que habian formado algunos grupos acerca de las nomas APA y luego se expusó el trabajo.
Conclusiones: No tengo, debido a mi ausencia.
Dificultades: No tengo, debido a mi ausencia.
Logros: No tengo, debido a mi ausencia.
¿Qué me pregunto?
Me pregunto que haré con los temas atrasados.
miércoles, 28 de noviembre de 2018
domingo, 25 de noviembre de 2018
Bitácora #1 (Proyecto Auto)
Bitácora#1
Descripción de la actividad: En esta primera clase, debido a mis ausencia por temas deportivos, mis compañero me dijeron lo que realizaron este día. Según mis compañeros, lo que hicieron fue juntarse en grupos asignados previamente por la profesora para realizar una actividad que consistía en señalar cómo se menciona un video de youtube utilizando las normas APA.
Conclusiones: No tengo, debido a mi ausencia.
Dificultades: No tengo, debido a mi ausencia.
Logros: No tengo, debido a mi ausencia.
¿Qué me pregunto?
Me pregunto que haré con los temas atrasados.
Descripción de la actividad: En esta primera clase, debido a mis ausencia por temas deportivos, mis compañero me dijeron lo que realizaron este día. Según mis compañeros, lo que hicieron fue juntarse en grupos asignados previamente por la profesora para realizar una actividad que consistía en señalar cómo se menciona un video de youtube utilizando las normas APA.
Conclusiones: No tengo, debido a mi ausencia.
Dificultades: No tengo, debido a mi ausencia.
Logros: No tengo, debido a mi ausencia.
¿Qué me pregunto?
Me pregunto que haré con los temas atrasados.
martes, 9 de octubre de 2018
Bitácora de robótica #3 (4toParcial)
- descripción de la actividad
Hoy realizamos avances en el tema de los informes, empezando el último de ellos.
- conclusiones
Nínguna
- dificultades
No hay.
- logros
No hay.
- ¿qué me pregunto?
Nada.
- imágenes o videos relacionados
Diario de trabajo #3 (4toParcial)
- Descripción de la actividad
Hoy traje la casa y concluimos con el tema de la decoración de dentro de la casa, un poco del exterior y avanzamos más en lo electrónico.
- Conclusiones
Concluimos con algo fundamental de la casa.
- dificultades
No hubo.
- logros
No hubo.
- ¿qué me pregunto?
Si podremos terminar este trabajo bien, para la semana de la presentacion.
sábado, 29 de septiembre de 2018
Bitácora de robótica #2 (4toParcial)
- descripción de la actividad
Nosotros, tenemos puesto algunos sensores y queriamos poner para que se activara con un pulsador, cosa que no teniamos, y decidimos que eso era lo mejor, y lo que hicimos fue incluir algunos leds extras y el pulsador en el codigo.
- conclusiones
Tenemos que ponernos manos a la obra, con ese tema ya.
- dificultades
No hay, porque aun no hemos realizado nada.
- logros
No hay, porque aun no hemos realizado nada
- ¿qué me pregunto?
Si podremos realizarlo con exactitud como queremos y realizar bien la conexion.
- imágenes o videos relacionados

Diario de trabajo #2 (4toParcial)
- Descripción de la actividad
Pues, en teoria hoy deberia haber traido la casa y mis compañeros haber traido algunos materiales para finiquitar la casa y empezar con lo electronico, pero mis compañeros de grupo no trajeron nada y por consecuente no trabajamos en lo absoluto.
- Conclusiones
Se puede decir, que no trabajamos nada, debido a la falta de responsabilidad por los materiales.
- dificultades
No hubo.
- logros
No hubo.
- ¿qué me pregunto?
Si podremos terminar este trabajo bien, para la semana de la presentacion.
sábado, 22 de septiembre de 2018
Bitácora de robótica #1 (4toParcial)
Estimados estudiantes, durante el parcial deberá culminar la elaboración de la maqueta, por lo tanto, en esta primera semana deberá seleccionar al menos 1 componente electrónico adicional para implementar en su proyecto, como por ejemplo: bluetooth, sensor de humedad, sensor de temperatura, pulsador. Las bitácoras de robótica deberán elaborarse en su blog con la siguiente información:
- descripción de la actividad
Nosotros, tenemos puesto algunos sensores y queriamos poner para que se activara con un pulsador, cosa que no teniamos, y decidimos que eso era lo mejor.
- conclusiones
Tenemos que ponernos manos a la obra, con ese tema ya.
- dificultades
No hay, porque aun no hemos realizado nada.
- logros
No hay, porque aun no hemos realizado nada
- ¿qué me pregunto?
Si podremos realizarlo con exactitud como queremos.
- imágenes o videos relacionados
Diario de trabajo #1 (4toParcial)
- Descripción de la actividad
Pues, en teoria hoy deberia haber traido la casa y algunos materiales para ya instalar y finiquitar la casa, pero mis compañeros de grupo no asistieron a clases y no traje la casa, porque pensaba que iba a dar mucho problema luego al llevarmela de vuelta.
- Conclusiones
Se puede decir, que no trabaje nada, durante las dos horas de clases, por lo mismo que comente antes, mi grupo se ausento y yo no traje los materiales para finalizarla por mi cuenta.
- dificultades
No hubo.
- logros
No hubo.
- ¿qué me pregunto?
Si podremos terminar este trabajo bien, para la semana de la presentacion.
miércoles, 29 de agosto de 2018
Práctica #1: ARDUINO + LDR
Aquí estuvimos en el laboratorio de informática programando y viendo los códigos que necesitábamos usar para la maqueta por ejemplo el servo motor , el pulsador, el foto resistor
en esta clase vimos la codificación del foto-resistor.
Pusimos el pin A0 como entrada que reciba la información proporcionada por el ldr(cambios de luminosidad). Configuramos los baudios para la recepción y transmisión de la información de la placa arduino con el ordenador, 9600 es una velocidad estándar receptada por muchas computadoras.
Y en void loop, colocamos que se pueda leer los números que nos envía el ldr al arduino por medio de Monitor serie.
Para añadir el servomotor entramos a Archivo, ejemplos, servo, Sweep. Aperician unos comandos ya hechos por otras personas en el cual tomamos algunas partes para poder configurar nuestro servo como:
1)#include <Servo.h>
2) myservo.attach(9)}
3)myservo.write(180);
Codigo completo:
#include <Servo.h>
Servo myservo;
int foto;// declaracion de la variable llamada foto
int led=2;// declaracion de variable entera para almacenar el
//pin del led
void setup() {
// put your setup code here, to run once:
pinMode(A0, INPUT);// PIN A0 COMO ENTRADA
pinMode(led,OUTPUT);//PIN 2 como salida
myservo.attach(3); // Servomotor conectado al pin 3
Serial.begin(9600);// Para vizualizar en la pantalla los valores
myservo.write(0); // Inicia con el servotor apagado
}
void loop() {
foto=analogRead(A0);//asignando a la variable el valor que lee
Serial.println(foto); // se mostrara los valores del LDR en Monitor serial
if(foto>500) // si el LDR envia una cantidad menor que 500 se apagara
{
digitalWrite(led,LOW);//apagar led
myservo.write(90); // el servomotor girara en 90°
}
else // le dice al arduino que si la condicion primera no se cumple haga otra
{
digitalWrite(led,HIGH);//encender led
myservo.write(180); // el servomotor se movera en 180°
}
}
Práctica #2: Sensor Ultrasónico HC-SR04
UNIDAD EDUCATIVA PARTICULAR “POLITÉCNICO”
3er Año PAI -9no “B”
PROYECTO UNIDAD 2
Casa Domótica
Integrantes:
Josué Paredes L. Nicolás Sierra
Los sensores en general se utilizan de forma de detectores de proximidad que trabajan con libres roces mecánicos y pueden detectar objetos a la distancia, cosas e incluso las manos de una persona y el sensor en cuestión es:

- un sensor de distancias por ultrasonidos capaz de detectar objetos y calcular la distancia a la que se encuentra en un rango de 2 a 450 cm. El sensor funciona por ultrasonidos y contiene toda la electrónica encargada de hacer la medición.
Descripción de actividad y conexión, programación
La actividad que se ha hecho con esta aparato es sencillo este se puede utilizar para por ejemplo soltar alguna alarma en la casa cuando detecte un objeto entrando en la casa o se puede utilizar como una forma de abrir la puerta sola, la conexión es en el arduino con todos las cosas que ya nos han puesto en la clase de informática.
Logros,dificultades y preguntas
Hemos conseguido algunos logros con esto como por ejemplo ya sabemos y tenemos una idea de hacer la casa algo mejor como consluión puedo sacar que esta es una parte fundamental para el proyecto en lo que electronicamente se hablaria y nuestra pregunta es como lo pondremos bien y de forma que funcione bien en nuestra casa.
domingo, 26 de agosto de 2018
Robotics Workshop
Elabore una entrada nueva en su blog con el resumen de la charla de Kyle Villota.
Recuerde incluir imágenes relacionadas y su conclusión al respecto
No tengo imagenes del momento, pero puedo decir que de toda la charla que dio Kyle Villota, puedo destacar obviamente su presentación, y esas cosas, pero más el curso que tomó de la NASA, cosa que me intereso bastante y como con eso particpo en concursos de robotica, junto con los legos MindStorm. Este parrafo se puede considerar tanto un resumen de todo como una conclusión del tema.
Investigación de componentes electrónicos
crear una nueva entrada donde resuma la investigarán sobre la aplicación, utilidad y funcionamiento de cada uno de los componentes electrónicos que intervienen en el proyecto:
* Sensor PIR
Aplicación: son frecuentemente usados en juguetes, aplicaciones domóticas o sistemas de seguridad.
Utilidad: Los sensores PIR se basan en la medición de la radiación infrarroja.
Funcionamiento: Estos captan la presencia detectando la diferencia entre el calor emitido por el cuerpo humano y el espacio alrededor.
* Sensor de humedad
Aplicación: En industrias, el campo, etc.
Utilidad: Medir la humedad del campo donde esta.
Funcionamiento: El sensor de humedad es un aparato de lectura utilizado en espacios interiores para controlar la humedad del aire y la temperatura.
* LDR
Aplicación: En robotica, labortarios, etc.
Utilidad: Los sensores de luz se usan para detectar el nivel de luz y producir una señal de salida representativa respecto a la cantidad de luz detectada.
Funcionamiento: El LDR (resistor dependiente de la luz) es una resistencia que varía su valor dependiendo de la cantidad de luz que la ilumina.
* BLUETOOTH
Aplicación: En celulares y/o aparatos electronicos.
Utilidad: La red del Bluetooth transmite datos a través de ondas de radio de baja potencia.
Funcionamiento: El Bluetooth tiene un área pequeña de redes de alto nivel diseñada para eliminar la necesidad de la intervención del usuario y para asegurar el ahorro de batería manteniendo la potencia de transmisión muy baja.
* Servomotor
Aplicación: Para la construcción de robots se utilizan motores paso a paso y/o servomotores.
Utilidad: Servomotor (también llamado Servo) es un dispositivo similar a un motor de corriente continua, que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación, y mantenerse estable en dicha posición.
Funcionamiento: La modulación por anchura de pulso, PWM (Pulse Width Modulation), es una de los sistemas más empleados para el control de servos. Este sistema consiste en generar una onda cuadrada en la que se varía el tiempo que el pulso está a nivel alto, manteniendo el mismo período (normalmente), con el objetivo de modificar la posición del servo según se desee.
* Motoreductor
Aplicación: Los reductores de velocidad o motorreductores son apropiados para el buen accionamiento de las máquinas y aparatos que necesitan reducir su velocidad eficientemente. Ejemplos de este proceso son un compresor industrial o un automóvil.
El motorreductor sirve para dar la capacidad de iniciar el movimiento por ejemplo del vehículo o del motor del compresor y mantener la velocidad.
Es preciso reducir las revoluciones del motor para tener el par suficiente (Par de fuerzas sistema formado por dos fuerzas paralelas entre sí de la misma intensidad que van en sentidos contrarios)
Utilidad: Una máquina que su movimiento es generado por un motor necesita que su velocidad sea la más adecuada para el buen funcionamiento de la máquina.
Funcionamiento: Por lo tanto, un motorreductor es un método para reducir la velocidad de las máquinas y aparatos que se usan en la industria, adaptando a una velocidad adecuada que permite el funcionamiento de forma segura y eficiente.
Los motorreductores están acoplados a la unidad de un motor eléctrico, este está cerrado y refrigerado por ventilador que se conecta a redes trifásicas.
* Sensor PIR
Aplicación: son frecuentemente usados en juguetes, aplicaciones domóticas o sistemas de seguridad.
Utilidad: Los sensores PIR se basan en la medición de la radiación infrarroja.
Funcionamiento: Estos captan la presencia detectando la diferencia entre el calor emitido por el cuerpo humano y el espacio alrededor.
* Sensor de humedad
Aplicación: En industrias, el campo, etc.
Utilidad: Medir la humedad del campo donde esta.
Funcionamiento: El sensor de humedad es un aparato de lectura utilizado en espacios interiores para controlar la humedad del aire y la temperatura.
* LDR
Aplicación: En robotica, labortarios, etc.
Utilidad: Los sensores de luz se usan para detectar el nivel de luz y producir una señal de salida representativa respecto a la cantidad de luz detectada.
Funcionamiento: El LDR (resistor dependiente de la luz) es una resistencia que varía su valor dependiendo de la cantidad de luz que la ilumina.
* BLUETOOTH
Aplicación: En celulares y/o aparatos electronicos.
Utilidad: La red del Bluetooth transmite datos a través de ondas de radio de baja potencia.
Funcionamiento: El Bluetooth tiene un área pequeña de redes de alto nivel diseñada para eliminar la necesidad de la intervención del usuario y para asegurar el ahorro de batería manteniendo la potencia de transmisión muy baja.
* Servomotor
Aplicación: Para la construcción de robots se utilizan motores paso a paso y/o servomotores.
Utilidad: Servomotor (también llamado Servo) es un dispositivo similar a un motor de corriente continua, que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación, y mantenerse estable en dicha posición.
Funcionamiento: La modulación por anchura de pulso, PWM (Pulse Width Modulation), es una de los sistemas más empleados para el control de servos. Este sistema consiste en generar una onda cuadrada en la que se varía el tiempo que el pulso está a nivel alto, manteniendo el mismo período (normalmente), con el objetivo de modificar la posición del servo según se desee.
* Motoreductor
Aplicación: Los reductores de velocidad o motorreductores son apropiados para el buen accionamiento de las máquinas y aparatos que necesitan reducir su velocidad eficientemente. Ejemplos de este proceso son un compresor industrial o un automóvil.
El motorreductor sirve para dar la capacidad de iniciar el movimiento por ejemplo del vehículo o del motor del compresor y mantener la velocidad.
Es preciso reducir las revoluciones del motor para tener el par suficiente (Par de fuerzas sistema formado por dos fuerzas paralelas entre sí de la misma intensidad que van en sentidos contrarios)
Utilidad: Una máquina que su movimiento es generado por un motor necesita que su velocidad sea la más adecuada para el buen funcionamiento de la máquina.
Funcionamiento: Por lo tanto, un motorreductor es un método para reducir la velocidad de las máquinas y aparatos que se usan en la industria, adaptando a una velocidad adecuada que permite el funcionamiento de forma segura y eficiente.
Los motorreductores están acoplados a la unidad de un motor eléctrico, este está cerrado y refrigerado por ventilador que se conecta a redes trifásicas.
viernes, 17 de agosto de 2018
Algoritmos para el proyecto
¿Que es un algoritmo?
Conjunto ordenado de operaciones sistemáticas que permite hacer un cálculo y hallar la solución de un tipo de problemas.
Escriba pasos ordenados del funcionamiento (programa) que sean detallados. Considere que estos pasos luego se convertirán en el programa para el Arduino.
Conjunto ordenado de operaciones sistemáticas que permite hacer un cálculo y hallar la solución de un tipo de problemas.
Escriba pasos ordenados del funcionamiento (programa) que sean detallados. Considere que estos pasos luego se convertirán en el programa para el Arduino.
domingo, 15 de julio de 2018
Entrada #4
He de ser sincero y decir que este día como nadie trajo los materiales necesarios, no trabajamos en nada, pero finalizamos la etapa B, con los diseños y terminando un poco más del cuadro de especificaciones de diseño.
Por conclusión, no puedo decir más que no hicimos nada, debido a no traer los materiales necesarios.
Obviamente no me pregunto nada, ni tengo logros, ni dificultades.
Por conclusión, no puedo decir más que no hicimos nada, debido a no traer los materiales necesarios.
Obviamente no me pregunto nada, ni tengo logros, ni dificultades.
Diseño final elegido
Especificaciones de diseño
Cliente
|
Lucy Lalama, mujer, 33 años, trabaja como contadora y organizadora de eventos, clase media
|
Consideraciones Ambientales
|
N/A
|
Costo
|
Alrededor de 100 dólares (no es seguro)
|
Estética
|
Toda la casa estará formada de madera, cada habitación tendrá una diferente medida pero la casa es simétrica.
|
Fabricaciòn
|
Consta con materiales como, madera de balsa, para la elaboración de la casa y madera MDF para la base de esta misma, aparte de césped sintético y vallas de madera para cercas, se llevará a cabo más o menos 1 mes para finalizar este proyecto.
Para el sistema, se necesitará materiales como Arduino, sensores, etc, que hemos de recurrir a su acceso de acuerdo a como vayamos avanzando.
|
Función
|
Nuestro proyecto vendría representando el modelo de casa domótica que sugirió nuestro cliente, intentando ser lo más fiel posible a dicha imagen.
|
Materiales
|
De momento tenemos previsto ocupar una base de madera MDF de 60cmx60cm, tablas de madera de balsa. El interior de habitaciones, cocina y esos detalles aún no tenemos estructurado cómo será, pero estamos trabajando en eso con el grupo. Para unir todas las piezas estamos en debate sobre si sería más conveniente usar pegamento industrial o silicona caliente o en su caso clavos.
Hablando del sistema eléctrico interno, contaremos con una placa arduino, sensores de movimiento, leds, cables varios y otros materiales requeridos en la lista de útiles. |
Seguridad
|
En el diseño tenemos en cuenta las condiciones básicas de un hogar. Aunque hablando a nivel de maqueta no podemos corroborar demasiado.
Al tratarse nuestro trabajo de una maqueta que proyecte un modelo de mayor tamaño, no será algo de muchísimo tamaño, pero no omitiremos detalles necesarios o fundamentales de la casa domótica dentro de estas limitaciones. |
Tamaño
|
En el diseño tenemos en cuenta las condiciones básicas de un hogar. Aunque hablando a nivel de maqueta no podemos corroborar demasiado.
Al tratarse nuestro trabajo de una maqueta que proyecte un modelo de mayor tamaño, no será algo de muchísimo tamaño, pero no omitiremos detalles necesarios o fundamentales de la casa domótica dentro de estas limitaciones. |
Paredes, J. (2018). Etapa B Desarrollo de ideas.docx. [online] Docs.google.com. Available at: https://docs.google.com/document/d/12LPZPtcSZCoKT2ZQpmeFChOqstcTs0rpPK4AZpYDk5Q/edit [Accessed 16 Jul. 2018].
Entrada #3
En esta entrada comentaré lo que realizamos, donde terminamos el diseño final de nuestra casa, viniendo a ser la fusión de mi diseño y el de mi compañero Nicolás, también comenzamos a realizar la etapa B de nuestro proyecto llamada Desarrollo de ideas, la cual no terminamos ese mismo día, pero igual avanzamos en el punto de especificaciones de diseño.
Este día no realizamos ni mucho ni poco, pero igual avanzamos en algo para nuestro proyecto.
No tuve ningún logro, ni ninguna dificultad.
La única duda que por así decirlo que permanece, es la de cómo avanzaremos en nuestra casa.
Especificaciones de diseño
Este día no realizamos ni mucho ni poco, pero igual avanzamos en algo para nuestro proyecto.
No tuve ningún logro, ni ninguna dificultad.
La única duda que por así decirlo que permanece, es la de cómo avanzaremos en nuestra casa.
Especificaciones de diseño
Cliente
|
Lucy Lalama, mujer, 33 años, trabaja como contadora y organizadora de eventos, clase media
|
Consideraciones Ambientales
|
N/A
|
Costo
|
Alrededor de 100 dólares (no es seguro)
|
Estética
|
Toda la casa estará formada de madera, cada habitación tendrá una diferente medida pero la casa es simétrica.
|
Fabricaciòn
|
Consta con materiales como, madera de balsa, para la elaboración de la casa y madera MDF para la base de esta misma, aparte de césped sintético y vallas de madera para cercas, se llevará a cabo más o menos 1 mes para finalizar este proyecto.
Para el sistema, se necesitará materiales como Arduino, sensores, etc, que hemos de recurrir a su acceso de acuerdo a como vayamos avanzando.
|
Función
|
Nuestro proyecto vendría representando el modelo de casa domótica que sugirió nuestro cliente, intentando ser lo más fiel posible a dicha imagen.
|
Materiales
|
De momento tenemos previsto ocupar una base de madera MDF de 60cmx60cm, tablas de madera de balsa. El interior de habitaciones, cocina y esos detalles aún no tenemos estructurado cómo será, pero estamos trabajando en eso con el grupo. Para unir todas las piezas estamos en debate sobre si sería más conveniente usar pegamento industrial o silicona caliente o en su caso clavos.
Hablando del sistema eléctrico interno, contaremos con una placa arduino, sensores de movimiento, leds, cables varios y otros materiales requeridos en la lista de útiles. |
Seguridad
|
En el diseño tenemos en cuenta las condiciones básicas de un hogar. Aunque hablando a nivel de maqueta no podemos corroborar demasiado.
Al tratarse nuestro trabajo de una maqueta que proyecte un modelo de mayor tamaño, no será algo de muchísimo tamaño, pero no omitiremos detalles necesarios o fundamentales de la casa domótica dentro de estas limitaciones. |
Tamaño
|
En el diseño tenemos en cuenta las condiciones básicas de un hogar. Aunque hablando a nivel de maqueta no podemos corroborar demasiado.
Al tratarse nuestro trabajo de una maqueta que proyecte un modelo de mayor tamaño, no será algo de muchísimo tamaño, pero no omitiremos detalles necesarios o fundamentales de la casa domótica dentro de estas limitaciones. |
Diseño final elegido
Paredes, J. (2018). Etapa B Desarrollo de ideas.docx. [online] Docs.google.com. Available at: https://docs.google.com/document/d/12LPZPtcSZCoKT2ZQpmeFChOqstcTs0rpPK4AZpYDk5Q/edit [Accessed 16 Jul. 2018].
Entrada #2
En esta segunda entrada, comentaré acerca de lo que hicimos, donde realizamos los dibujos tanto mi compañero Nicolás como mi persona y avazamos un poco en el diseño final, aparte de terminar el informe de indagación y análisis, donde primero realizamos el análisis de productos existentes, en donde investigamos acerca de proyectos similares a los que haremos y luego incluímos los aspectos a incluir y a evitar y luego terminamos con las instrucciones de diseño.
En este día se podría decir que si avanzamos más en el tema de nuestro proyecto, en todos los aspectos, tanto en los informes de informática y en los diseños para mecánica de nuestra futura casa domótica.
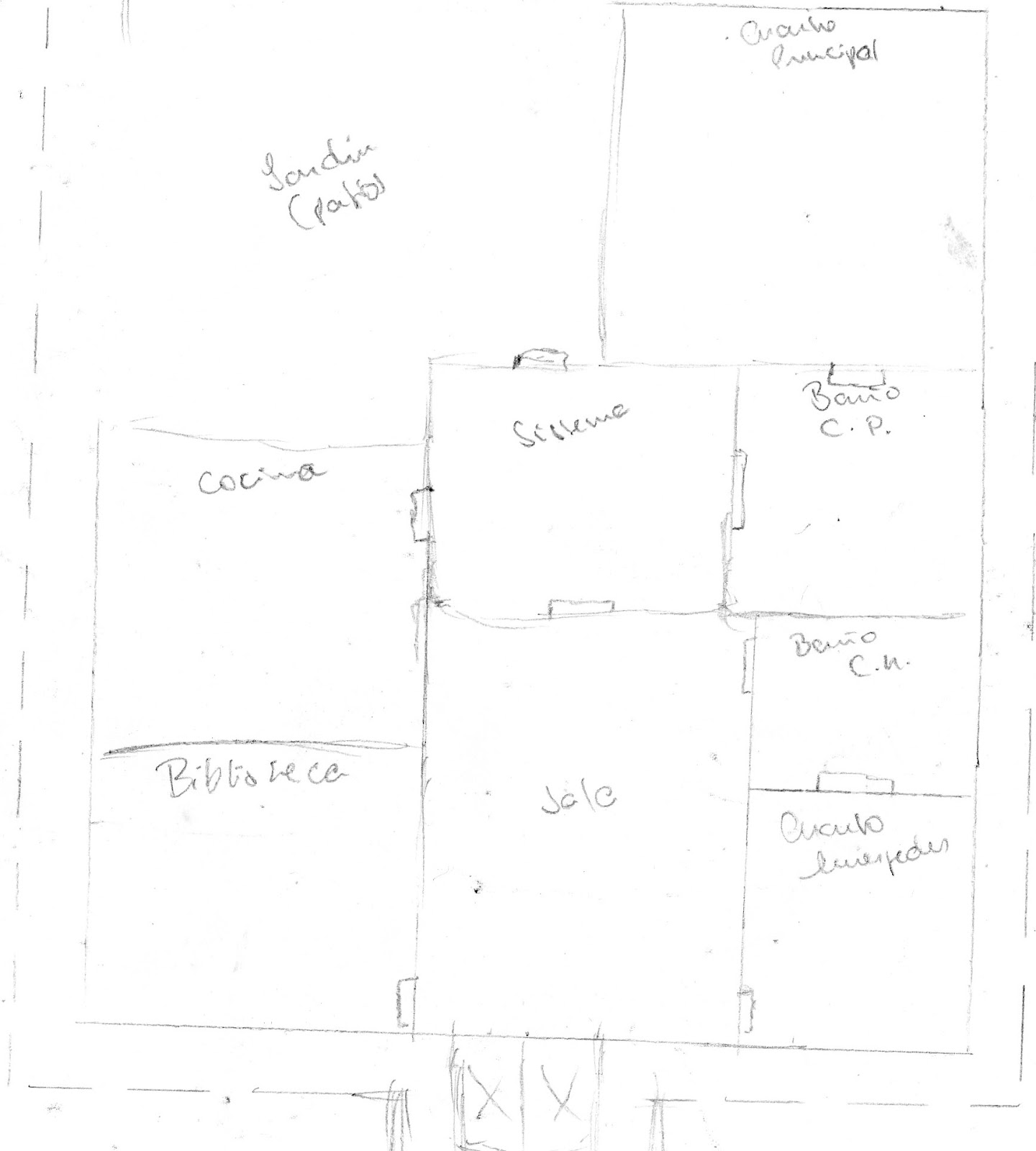
No tuve dificultades ni logros, solo se me hizo un poco complicado el hecho de ubicar las habitaciones dentro de mi diseño para nuestra futura casa.
Aqui viene mi duda, y es que como es que nosotros lograremos realizar nuestra casas en condiciones y comos pondremos el sistema, eso es lo que me pregunto.
Mi diseño:

Diseño de mi compañero Nicolás:

Paredes, J. (2018). Etapa A: Indagación y Análisis 2.0 :v. [online] Docs.google.com. Available at: https://docs.google.com/document/d/1Hr31I46bSqecPy5fM9UeenVuIoJreoZoRVGcq49wfsM/edit [Accessed 16 Jul. 2018].
En este día se podría decir que si avanzamos más en el tema de nuestro proyecto, en todos los aspectos, tanto en los informes de informática y en los diseños para mecánica de nuestra futura casa domótica.
No tuve dificultades ni logros, solo se me hizo un poco complicado el hecho de ubicar las habitaciones dentro de mi diseño para nuestra futura casa.
Aqui viene mi duda, y es que como es que nosotros lograremos realizar nuestra casas en condiciones y comos pondremos el sistema, eso es lo que me pregunto.
Aspectos a incluir
|
Aspectos a evitar
|
Utilizar los sensores que tengamos que usar, incluyendo Arduino.
|
Que el cableado no sea visible y evitar el daño en los materiales de trabajo.
|
Hacer un modelo original a los demás.
|
Gastar más del presupuesto dado por el cliente
|
Utilizar decoraciones internas tanto como externas.
|
Sobrecargar el sistema eléctrico para evitar fallas técnicas.
|
Diseño de mi compañero Nicolás:
Paredes, J. (2018). Etapa A: Indagación y Análisis 2.0 :v. [online] Docs.google.com. Available at: https://docs.google.com/document/d/1Hr31I46bSqecPy5fM9UeenVuIoJreoZoRVGcq49wfsM/edit [Accessed 16 Jul. 2018].
Entrada #1
En esta primera entrada, hablaré de lo que hicimos durantre este día fue organizar las medidas de los materiales que ibamos a traer, luego comenzar a hacer la Etapa A de nuestro proyecto, llamada Indagación y Análisis, el cual avanzamos hasta el plan de investigación.
Este día no hicimos mucho más que avanzar en lo básico por asi decirlo, en donde tuvimos que ver los materiales que necesitariamos y sus medidas, aparte de lo que también necesitariamos investigar para nuestro proyecto.
No se me hizo dificil nada ni logre mucho, ya que en los años anteriores, habiamos trabajados en temas similares.
No tengo nínguna interrogante durante este día, debido a que ya sabia como hacer ciertas cosas.
El terreno para la vivienda contará con las siguientes medidas máximas:
Paredes, J. (2018). Etapa A: Indagación y Análisis 2.0 :v. [online] Docs.google.com. Available at: https://docs.google.com/document/d/1Hr31I46bSqecPy5fM9UeenVuIoJreoZoRVGcq49wfsM/edit [Accessed 16 Jul. 2018].
Este día no hicimos mucho más que avanzar en lo básico por asi decirlo, en donde tuvimos que ver los materiales que necesitariamos y sus medidas, aparte de lo que también necesitariamos investigar para nuestro proyecto.
No se me hizo dificil nada ni logre mucho, ya que en los años anteriores, habiamos trabajados en temas similares.
No tengo nínguna interrogante durante este día, debido a que ya sabia como hacer ciertas cosas.
El terreno para la vivienda contará con las siguientes medidas máximas:
● Largo: 60 cm
● Ancho: 60 cm
Para la parte estructural, la altura máxima será de 15 cm
● Ancho: 60 cm
Para la parte estructural, la altura máxima será de 15 cm
Plan de Investigación
Prioridad
|
Necesito investigar
|
Fuente primaria
|
Fuente secundaria
|
¿Por qué necesito investigarlo?
|
Alta
|
Los gustos y la necesidad del cliente.
|
Entrevista
|
Porque así podemos saber los gustos y que necesita el cliente en su casa.
| |
Alta
|
Ventajas y Desventajas de la domótica.
|
Sitio web
|
Ya que así sabremos qué incluir y qué no en la casa y estaremos conscientes de los inconvenientes que trendrà.
| |
Media
|
El presupuesto dado por el cliente.
|
Entrevista
|
Porque así sabremos más o menos los precios de los materiales que usaremos.
| |
Alta
|
Una casa de referencia.
|
Sitio web
|
Para poder usarla como referencia y así ver las medidas para construirla.
| |
Muy Alto
|
Que sensores necesitaremos y como programarlos.
|
Clases de informática
|
Sitio web
|
Ya que así sabremos qué clases de sensores son los más recomendados para este tipo de trabajo.
|
Bitácora de Indagación y Análisis
Dentro de esta etapa, empezamos analizando cual es el problema y que necesitaremos para realizar el proyecto por medio de un plan de investigación, de allí analizamos los productos existentes, que en este caso fueron cuatro, de los cuales yo añadi un extra por mi parte, a continuación procedimos a escribir los aspectos a incluir y a evitar de nuestra proyecto:

Aspectos a incluir
|
Aspectos a evitar
|
Utilizar los sensores que tengamos que usar, incluyendo Arduino.
|
Que el cableado no sea visible y evitar el daño en los materiales de trabajo.
|
Hacer un modelo original a los demás.
|
Gastar más del presupuesto dado por el cliente
|
Utilizar decoraciones internas tanto como externas.
|
Sobrecargar el sistema eléctrico para evitar fallas técnicas.
|
De allí hicimos las instrucciones de diseño donde resumimos el análsis de investigación.
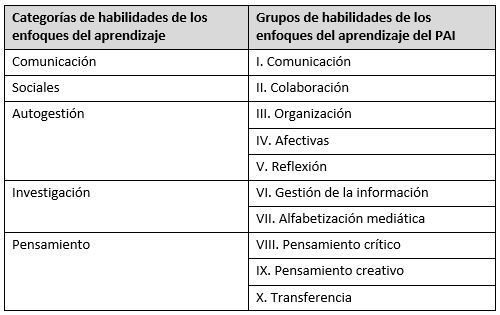
Enfoques:
Dentro de los enfoques, en mi opinión los que he desarollado durante esta etapa son comunicación y más por la parte de que durante algunas semanas, mi compañera de trabajo Justine Bravo no asisitió y tuve que decirle las cosas que se necesitaba hacer, por otro lado el enfoque de pensamiento, en el ambito de pensamiento creativo, al crear los planos de casa que vamos a hacer.
Atributos del perfil IB:
Entrando en el tema de los atributos del perfil, retomando lo que dije en los enfoques puedo decir que desarrolle el de buenos comunicadores, pensadores. Por otra parte, me pidieron ayuda en cortar una tabla de madera, aqui aplique el de solidario y para el blog al dia aplicaré el atributo de íntegros.
Logros y Dificultades:
No se me dificultó nada, por el hecho de que ya llevamos haciendo este tipo de cosas desde hace ya tiempo y ya me acostumbré, pero de logros, podría decir que logré hacer un mejor trabajo desde mi punto de vista.
Suscribirse a:
Comentarios (Atom)